
This week we were testing out different cameras for a mount on top of our drone. This is to be used as a primary camera for filming straight ahead. We took pictures and videos of the same target with the GoPro 3, the HERO Session, and the Sony action cam mini.

This is our test site for testing range of view between cameras
Using the technique showed in the picture to see the field of view and image quality, we could test these cameras with actual results instead of computer data (like megapixels and such). The Sony camera was probably the best with image quality and field of view, because of its major fish eye effect.

Here Ben is flying the drone around to compare image resolution
We mounted each to ATLAS and flew it around gathering image quality data. Next I set up and tested a Lidar sensor. This is a way, like radar, to map rooms with lasers. The device shoots out lasers in every direction and it bounces back into the sensor for a layout of the room.

This is the Lidar sensor and its data from a section of the room
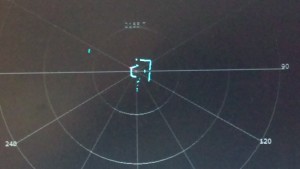
This is the Lidar sensor and its data from a section of the room
This equipment could be very helpful to us if it were mounted on drones. This week comes to an end and unfortunately I only have one week left.

Here I had to cut and solder on new connectors to the motor wires so they would fit the battery connector holes
There are no comments published yet.